

Мы собрали и подготовили ответы на Ваши самые популярные вопросы. Если Вы не нашли ответа на интересующий Вас вопрос, то смело можете задать его, написав на почту info@rusgeosystems.ru или оставьте заявку на сайте в разделе обратной связи.
 Что такое ГНСС?
Что такое ГНСС? ГНСС (Глобальная Навигационная Спутниковая Система, Global Navigation Satellite System, GNSS) – система, предназначенная для определения местоположения (географических координат) наземных, водных и воздушных объектов. Спутниковые системы навигации также позволяют получить скорости и направления движения приёмника сигнала. Кроме того, могут использоваться для получения точного времени. Такие системы состоят из космического оборудования и наземного сегмента (систем управления). На данный момент запущены и работают 4 системы спутниковой навигации с глобальным покрытием: ГЛОНАСС, GPS (NavStar), BeiDou (Compass), Galileo.
Что такое базовая станция? Базовая станция (также опорная или референцная станция) – приемник, размещённый на точке с известными координатами и отслеживающий то же созвездие, что и ровер (приёмник–потребитель) дифференциальных поправок. Сформированный БС поток поправок реального времени передаётся через радиомодем (GSM-модем) для обеспечения сантиметровой точности определения места в реальном масштабе времени. Базовая станция может быть частью сети виртуальных опорных станций, а также накапливать спутниковые данные определенный период времени для последующей постобработки в камеральных условиях для достижения более высокой точности определения местоположения.
Что такое ровер? Ровер (приёмник-потребитель, подвижный приемник) – прибор, использующий дифференциальные поправки в решении навигационной задачи. Дифференциальные поправки могут быть получены ровером от базовой станции или от спутника дифференциальной коррекции
Методы ГНСС-наблюдений Для определения местоположения объекта на местности с помощью спутниковой навигации самую важную роль играет точность определения расстояния между спутником и приемником в конкретный момент времени. Чтобы вычислить это расстояние, необходимо знать скорость и время прохождения радиосигнала, который излучает спутник. Если скорость распространения радиосигнала можно принять равной скорости света, то синхронизировать бортовые часы навигационного спутника и приемника для фиксации точного времени излучения и приема сигнала более сложная задача. В идеальном варианте, когда измерения производятся точно и показания часов спутников и приемника совпадают, для определения положения приемника в пространстве достаточно произвести измерения до трех навигационных спутников. В реальной жизни для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один – смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи приемник должен отслеживать, как минимум, четыре навигационных спутника.
Сам радиосигнал спутника содержит информацию о координатах спутников и поправку в часы приемника – все это называется навигационным сигналом. Существует два типа сигналов спутников и в зависимости от этого типа используются два способа определения расстояния между приемником и спутником – по измерениям кода и фазы несущей. В ГНСС реализовано свое системное время, по которому происходит синхронизация спутников и приемника. За счет совмещения выработанных приемником и спутником одинаковых кодовых последовательностей, приемник рассчитывает время выхода сигнала и время его прохождения от спутника до приемника – таким образом вычисляется псевдодальность. Приставка «псевдо-» не случайна – из-за того, что часы приемника менее точные, в расчет расстояния входит ошибка хода часов. Точность совмещения псевдослучайных последовательностей равна длине символа, то есть порядка 3 м для гражданского C/A-кода и около 0,3 м для защищенного P-кода.
Чтобы добиться более высокой точности, можно измерять фазу радиосигнала со спутника – фазе несущей. На частоте L1 длина волны около 19 см, а фаза этой волны колеблется в пределах 360°. Следовательно, псевдодоальность можно вычислить с субмиллиметровой точностью. Аналогично кодовому сигналу, спутником и приемником генерируются фазомодулированные сигналы, которые не синхронизированы между собой. Дробная часть фазы определяется вычислением смещения фазомодулированного сигнала, а определение целого числа волн можно решить через систему уравнений – решение фазовой неоднозначности. Приблизительное решение является плавающим для конечного пользователя, а однозначное – фиксированным.
Различают два метода ГНСС-наблюдений: абсолютный и относительный. Абсолютный метод позволяет определить местоположение приемника по пространственной засечке без использования корректирующей информации от БС или спутников дифференциальной коррекции. Для реализации пространственной засечки необходима информация о величине псевдодальности и данные о положении минимум четырех спутников. Псевдодальность рассчитывается по коду радиосигнала, а данные местоположения спутников передаются в навигационном сообщении. Таким образом вычисляются неизвестные координаты по трем осям и поправка за ход часов приемника. Точность определения местоположения приемника зависит от качества кварцевого генератора времени и составляет 5-15 м.
Для реализации относительного метода необходимо использование минимум двух приемников, один из которых должен неподвижно находиться на пункте с известными координатами (базовый приемник), а второй может использоваться в качестве подвижного (роверный приемник). При использовании базового приемника в качестве опорного, по разнице координат, определенных базовым приемником по спутникам и введенных вручную известных координат этого пункта, рассчитывается поправка в псевдодальность. Эта поправка по различным каналам связи может быть передана роверу, установленному на определяемом пункте, который использует ее для корректирования измеренных псевдодальностей и уточнит определение своего местоположения.
Относительный метод определения положения можно реализовать двумя способами: по кодовым измерениям, либо по фазе несущей. Относительный метод, использующий кодовые измерения, называется дифференциальным или DGPS, точность данного метода субметровая, при этом поправка в псевдодальность может передаваться на значительные расстояния. Достигнуть сантиметровой точности позволит относительный метод по измерениям фазы несущей. Данные измерения могут быть как статическими, так и кинематическими. Статический метод наблюдения реализуется измерениями конкретной точки несколькими эпохами, а кинематический позволяет создать траекторию движения приемника. Увеличение точности связано с длительностью измерений и с условиями наблюдений.
Виды поправок от базовой станции Поправки – это корректирующая информация, которая передается от базовой станции к роверу для уточнения его координат. Существует различное множество видов поправок, разработанные конкретными производителями оборудования (например, CMR), но общепринятым открытым форматом, доступным любому ГНСС-приемнику, является RTCM. Международный формат поправок RTCM был разработан специальным комитетом SC 104 Радиотехнической комиссии по морским сервисам США для стандартизации передачи корректирующей информации (КИ). Этот формат состоит из множества сообщений, которые позволяют передавать информацию как по существующим, так и по развертываемым спутниковым системам. За время своего функционирования формат обновлялся и дополнялся.
Сеть базовых станций RTKNet использует преимущественно следующие версии формата RTCM: RTCM 3.0, позволяющий передавать информацию по двум спутниковым системам (ГЛОНАСС и GPS), и RTCM 3.2 MSM, объединяющий данные по большему количеству спутниковых систем (основные из них – ГЛОНАСС, GPS, BeiDou, Galileo). Для максимально полного охвата информации, передаваемой в поправках, необходимо использовать формат RTCM 3.2 MSM. Помните, что в решении участвуют только те системы и спутники, которые база и ровер отслеживали одновременно. Если базовый приемник принимает все доступные спутниковые сигналы от всех систем, а ровер только ГЛОНАСС и GPS, то бесполезно ждать в решении спутники BeiDou, и наоборот. Однако, если оба приемника могут работать по всем спутниковым системам, а Вы выбрали поправку RTCM 3.0, то Вы сами ограничиваете возможности оборудования до двух спутниковых систем.
На каком расстоянии от БС можно работать? Каждая станция имеет свою рекомендуемую зону покрытия (на примере сети БС RTKNet 60 км радиус малого круга, 80 км – большого). Находясь внутри малого круга зоны покрытия конкретной БС, Ваш ровер получит фиксированное решение с высокой вероятностью (при условии наличия покрытия сотовой сети и отслеживании общих с БС спутников). Большой круг зоны покрытия конкретной БС является рекомендованным радиусом для работы в режиме статика. Данные ограничения носят рекомендательный характер, в действительности же, можно работать и на большем удалении от БС, но при этом важно понимать, что с удалением от БС будет снижаться скорость инициализации, количество общих спутников, а также точность определения местоположения.
Как сократить влияние ошибок при ГНСС-измерениях? Принцип работы ГНСС-приемников заключается в приеме и обработке радиосигналов со спутников, которые находятся на высоте около 20 тыс.км. над поверхностью Земли. Поэтому, чем меньше ошибок будет допущено в приеме спутникового сигнала, тем точнее и надежнее будет определено местоположение приемника.
Важно создать наиболее оптимальное условие для работы ГНСС-приемника – максимально открытый небосвод. Любой физический предмет может создавать помехи для радиоволн, что может сказываться на точность определения местоположения. Отраженный от различных поверхностей спутниковый сигнал искажается, что приводит к эффекту многолучевости, от которого очень сложно избавиться в спутниковых измерениях, поэтому приемник необходимо устанавливать на максимально открытом пространстве вдали от источников переотражения и многолучевости спутникового сигнала.

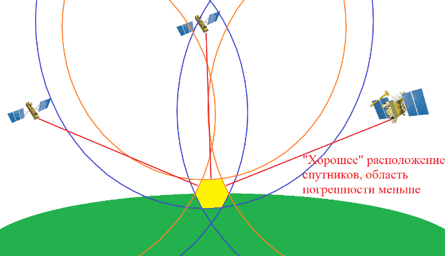
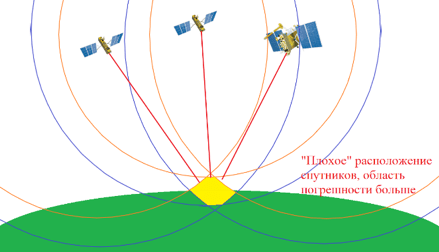
Помимо открытого небосвода, важно пространственное расположение спутников. DOP (Dilution ofPrecision) – фактор ухудшения точности. Качество спутниковых наблюдений зависит от геометрического расположения спутников на небосводе. Когда спутники равномерно расположены по небосводу – значение DOPминимально, а точность определений высока. Когда все спутники расположены близко друг к другу на небосводе, значение DOP увеличивается, а точность спутниковых определений уменьшается. Следовательно, чем меньше DOP, тем меньше геометрия расположения спутников на небосводе влияет на результаты измерений. PDOPопределяет трехмерную геометрию расположения спутников. Другие виды DOP включают HDOP (в плане) и VDOP (по высоте), которые связаны с точностью определения местоположения в плане (широта и долгота) и по высоте соответственно.
Также, важную роль в спутниковых наблюдениях играют возмущения в атмосфере, связанные с солнечной активностью (магнитные бури, вспышки). Наиболее часто геомагнитное поле возмущено вблизи экватора, поэтому, находясь на территории РФ, в большинстве случаев, влияние геомагнитного фона сведено к минимуму. Но лучше заранее убедиться и быть уверенным, что этот фактор не повлияет на результаты измерений.
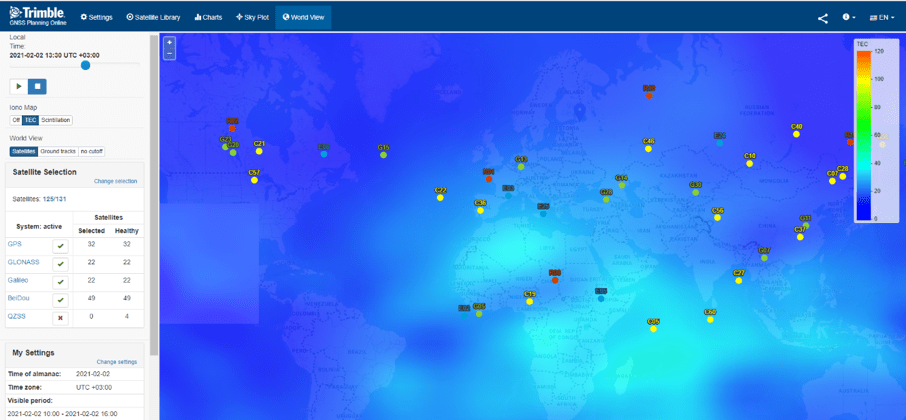
Планирование ГНСС-измерений можно сделать, используя сайт https://www.gnssplanning.com/. Там можно увидеть прогноз состояния геомагнитного фона в месте проведения измерений, оценить количество отслеживаемых спутников и PDOP на конкретный момент времени.
Можно ли приемниками SOUTH работать от сторонних БС? Приемники SOUTH, как и другие аналогичные ГНСС-приемники, могут принимать поправки от БС не только в общепринятом формате RTCM и RTCA, но и CMR, NovAtel. Помимо этого, при работе от БС также важен и канал передачи данных. Рассматривая оборудование SOUTH, можно выделить основные каналы передачи данных, позволяющие Вашему роверу принимать и использовать поправки от сторонних БС (будь то сеть ПДБС, либо отдельный приемник стороннего производителя, запущенный в режиме БС): UHF, GSM, internet. Следовательно, если сторонняя БС передает поправки в доступных форматах поправок и по перечисленным выше каналам передачи, то приемник SOUTH можно использовать в качестве ровера от этой базы.
UHF (УКВ-модем) Чтобы работать по UHF (УКВ, ультракоротковолновая радиосвязь), необходимо, чтобы базовый и роверный приемники имели встроенные либо внешние радиомодемы и радиоантенны. В зависимости от модели УКВ-модемы работают на прием, передачу или прием/передачу поправок. На базовом приемнике модем настраивается на передачу, а на ровере – на прием. От мощности радиомодема, установленного на базовой станции, зависит радиус зоны покрытия поправками. Зависимость прямая: чем выше мощности – тем больше радиус работ. Поэтому, зачастую, на БС устанавливают внешние радиомодемы, так как они имеют бОльшую мощность, по сравнению с встроенными. Помимо наличия встроенного либо внешнего радиомодемов на базе и на ровере, важна поддержка обоими радиомодемами следующих параметров: одинаковый протокол шифрования данных (наиболее распространенные протоколы – TrimTalk450S, Satel), частота передачи данных (наиболее распространенный диапазон – 410-470 МГц), скорость передачи данных (4800, 9600, 19200 бит/сек), а также ширина канала (12.5 или 25 Гц). Следовательно, выбрав одинаковые значения параметров передачи данных на базе и на ровере, можно установить связь между приемниками вне зависимости от производителя оборудования. Помимо этого, плюсом использования радиосвязи является то, что к одной базе можно подключить неограниченное количество роверов. На данный момент все приемники SOUTH (кроме S660) поставляются со встроенными радиомодемами мощностью 3 Ватта. При работе по УКВ не забывайте накручивать УКВ-антенны на приемники и внешние радиомодемы во избежание выхода из строя радиомодуля.
GSM-модем Для работы по GSM связи используется протокол CSD (для использования данного протокола, возможно, придется сменить текущий тариф, уточняйте у своего оператора связи). Голосовая связь основана на передаче данных по голосовому каналу. Для работы в этом режиме связи базовый и роверный приемники должны использовать GSM-модемы (они также бывают встроенные и внешние) с антеннами и сим-карты с подключенной опцией CSD (факсимильная связь). Передача данных между приемниками осуществляется путем прямого дозвона, следовательно, при наличии одного GSM-модема на базе, от нее получать поправки сможет только один ровер, что является минусом для данного канала передачи данных. Помимо этого, многие операторы отказываются от предоставления услуги передачи данных по голосовому каналу, а новые базовые GSM-станции ее попросту не поддерживают. На данный момент все приемники SOUTH (кроме S660) поставляются со встроенными GSM-модемами.
Сеть Internet Сеть Интернет является самым передовым видом связи на данный момент. Встроенные GSM-модемы современных ГНСС-приемников поддерживают GPRS-связь, а в качестве внешнего GPRS-модема используется GSM-модем контроллера, понадобится только сим-карта с доступом в Интернет. При использовании сети Интернет поправки от базовой станции передаются на сервер, с которого ровер скачивает их. Количество роверов, способных получить поправки от базовой станции, ограничивается возможностями сервера. Для работы по сети Internet используются различные протоколы, такие как TCP/IP, NTRIP (наиболее распространенный), HUACE, ZHD. При работе по протоколу TCP/IP роверу необходимо задать IP-адрес и порт сервера, после чего он может подключиться к нему для приема поправок. Один порт позволяет работать только с одним потоком данных и, соответственно, только с одним форматом поправок. При работе по протоколу NTRIP для доступа в сеть Internet можно использовать GSM-модем с сим-картой, интернет контроллера, либо Wi-Fi точку доступа. Данный протокол работает аналогично TCP/IP, но дополнительно используется кастер, позволяющий привязать несколько потоков с различной информацией (видами поправок) к одному IP-адресу. С помощью этого кастера также настраивается доступ к данным, то есть получать данные с сервера по протоколу NTRIP можно только при наличии IP-адреса, порта и действующего аккаунта. Сеть ПДБС RTKNet использует именно этот протокол передачи данных, поэтому для работы от БС RTKNet роверу необходим доступ в сеть Internet. Количество подключенных одновременно роверов ограничивается только физическими возможностями сетевого оборудования.
Почему лучше приобретать приемник с полным комплектом встроенных модемов? Каждый способ связи имеет свои достоинства и недостатки, поэтому наличие ГНСС-приемника с полным комплектом встроенных модемов дает преимущество в выборе способа связи между базой и ровером. Куда бы Вам не пришлось направиться со своим оборудованием, сперва необходимо изучить местность на доступность сетей связи. Если Вы оказались в месте, где отсутствует сотовая связь или Интернет, то на помощь придет радиомодем, модуль которого уже встроен в Ваш приемник. Поэтому, имея полный комплект встроенных модемов, пользователь расширяет потенциальную территорию будущих работ.
Преимущества «горячей» замены аккумулятора Возможность «горячей» замены аккумулятора есть у некоторых моделей приемников SOUTH – это приемники Galaxy G1 Plus и G7, которые имеют аккумуляторный отсек для двух АКБ. Преимуществом в данном случае будет то, что пользователю оборудования не придется тратить время на выключение/включение приемника, поиск спутников, повторную настройку приемника и инициализацию. Полезной «горячая» замена будет в том случае, если Вам необходима беспрерывная работа приемника, например в следующих случаях: запись длительных непрерывных сессий статических наблюдений, при работе приемника в качестве полевой базовой станции без возможности подключения к внешнему аккумулятору, при работе в зимнее время года, так как на холоде АКБ разряжаются быстрее, в отличие от использования в теплое время года.
Можно ли работать ГНСС-оборудованием SOUTH в дождь/снег? ГНСС-оборудование SOUTH имеет высокую степень пыле- влагозащиты, что позволяет использовать его в условиях плохой погоды продолжительное время. Если идет дождь/снег, не стоит пытаться укрыть Ваш приемник от осадков целлофановым пакетом или другими вещами, если Вы планируете продолжать работать им в условиях непогоды. Приемник позволит продолжить выполнение ГНСС-наблюдений в непогоду за исключением грозовых разрядов, так как молнии являются источником помех для спутникового сигнала. Единственной рекомендацией после работы в подобных условиях будет следующее: приемник после окончания работ необходимо извлечь из кейса, извлечь аккумулятор, после этого дать приемнику просохнуть с открытой крышкой аккумуляторного отсека (во избежание скопления конденсата) при комнатной температуре. После просушки приемника и кейса, его можно убрать на хранение.
Как выбрать контроллер для Вашего приемника? При выборе контроллера необходимо обратить внимание на следующие детали: технические характеристики контроллера и условия работы оборудования.
В первую очередь необходимо определить, какое программное обеспечение позволит взаимодействовать контроллеру с Вашим приемником и удобно ли Вам будет работать с этим программным обеспечением. На данный момент большинство контроллеров идет на базе ОС Windows Mobile и Android.
Для работы с приемниками SOUTH подойдут контроллеры, работающие на обеих ОС. Наиболее распространенные программы для ОС Windows Mobile, поддерживающие оборудование SOUTH, – это SurvCE, которая является универсальной для большого количества производителей ГНСС-приемников (поддерживает приемники SOUTH до версии 6.09) и EGStar. Популярные контроллеры с ОС Windows Mobile – SOUTH X11, Getac 336, SOUTH T17.
Для Android подойдут такие программы, как SurvX, SurPad, EGStar и GIStar. Наиболее популярным, удобным в использовании и гибким ПО считается SurvX, при этом ПО SurPad является его полным аналогом, единственным отличием которого есть то, что он позволяет подключиться к более расширенному списку приемников (подобно SurvCE).
Популярные контроллеры с ОС Android – SOUTH Polar H3 Plus, BlackView BV6100. Помимо этих контроллеров также есть SOUTH N80 (планшет), SOUTH H5, Geoelectron P9. Программы на Android обладают более дружественным интерфейсом и расширенным функционалом по сравнению со своими аналогами на ОС Windows. Помимо этого, такие программы можно установить не только на специализированные ГНСС-контроллеры, но и на обычные телефоны с ОС Android.
Также важно понимать, в каких погодных условиях будет использоваться Ваше оборудование. Если планируются частые работы в местности, где наблюдаются низкие температуры, то в первую очередь необходимо обратить внимание на рабочую температуру, которая указана в ТХ контроллера. Использование контроллера за пределами диапазона рабочих температур отразится на его отзывчивость к командам и в конечном итоге может вывести аппарат из строя. Помимо этого, при частой работе при отрицательных температурах, важно наличие клавиатуры, потому что многие современные контроллеры, имея сенсорный экран, не поддерживают управление в обычных перчатках. Также стоит отметить такой немаловажный фактор, как емкость батареи контроллера. Чем выше емкость АКБ – тем дольше контроллер сможет проработать без дополнительной подзарядки. Но стоит понимать, что при низких температурах контроллер проработает значительно меньше, поэтому для увеличения его времени работы можно отключить неиспользуемые модули, закрыть неиспользуемые приложения и снизить яркость экрана, если погодные условия позволяют сделать это. Современные Android-контроллеры можно зарядить с помощью внешних аккумуляторов (Power Bank) – это позволит контроллеру проработать дольше обычного.
При работе в сложных условиях важна защита Вашего контроллера – ударопрочный корпус и пыле- влагозащита. Если Вы занимаетесь кадастровыми работами, Вам может подойти контроллер на базе обычного пыле- влагозащищенного мобильного телефона, например BlackView BV6100. Если Вы часто работаете с картой или активной подложкой, Вам нужен большой экран, чтобы видеть больше информации на дисплее, то Вам подойдет контроллер SOUTH N80 в виде планшета. Для продолжительной работы в более сложных условиях Вам могут подойти контроллеры с клавиатурой, такие как SOUTH Polar H3 Plus, SOUTH H5, SOUTH X11, Getac 336, SOUTH T17. Если Вам необходима расширенная клавиатура (ABCDE) – Вам может подойти контроллер Geoelectron P9.
Коррекция наклона. Магнитный инклинометр Принцип компенсации наклона вехи ГНСС-приемника следующий: зная длину вехи, необходимо определить угол наклона вехи (за это отвечает электронный уровень) и направление отклонения (за это отвечает электронный компас), после чего можно рассчитать данные о положении наконечника вехи. Данный метод имеет ряд недостатков: на точность измерений электронного компаса влияют электромагнитные возмущения (ЛЭП, прочие металлоконструкции), магнитное поле не постоянно в пространстве, ограниченный диапазон компенсации наклона, при смене местоположения необходимо выполнять калибровку датчиков заново.
Коррекция наклона. Инерциальная система Преимуществом инерциальной системы (IMU) над магнитным инклинометром является то, что инерциальная система не подвержена электромагнитным помехам и может использоваться при больших углах наклона. Принцип компенсации наклона остался тот же, различаются только модули, выполняющие измерения положения приемника: в инерциальной системе используется MEMS-датчик, состоящий из трехосевого гироскопа, трехосевого акселерометра и встроенного микропроцессора, объединяющего данные. Скорость работы с инерциальной системой значительно возросла, так как теперь появилась возможность выполнять съемку недоступных объектов, таких как углы здания, а также в сложных условиях – достаточно сориентировать приемник в направлении наиболее открытого неба.
Виды OEM-плат приемников, как выбрать подходящую под Ваши задачи? На данный момент приемники SOUTH поставляются на следующих платах: Trimble BD970 (220 каналов), BD940 (336 каналов), BD990 (336 каналов), NovAtel OEM729 (555 каналов), ComNav K708 (692 канала).
Приемники на платах компании Trimble являются наиболее надежными по качеству обработки данных. Такие приемники позволяют работать в сложных условиях (залесенная местность, городская застройка), но всему есть предел. Плата Trimble BD970 на 220 каналов зарекомендовала себя как надежный OEM-модуль, использовавшийся в большом множестве приемников (из оборудования SOUTH это приемники G1, G1 Plus, G6). Данная плата на рынке уже около 10 лет, поэтому на смену этой плате вышел обновленный модуль – BD990 на 336 каналов (приемники G1 Plus, G6, G7), и его более компактный аналог BD940 на 336 каналов (приемник S660). Новые платы получили улучшенную технологию обработки спутниковых сигналов (Maxwell 7), что сказывается на стабильности работы в сложных условиях. Помимо этого, приемники с платами нового поколения позволяют определить свое местоположение используя сервис поправок RTX без использования базовой станции.
Приемники на плате NovAtel OEM729 555 каналов не пользуются большим спросом среди пользователей оборудования SOUTH, так как данный OEM-модуль может вести себя непредсказуемо в условиях ограниченной видимости спутников. При работе в сложных условиях данным приемником могут наблюдаться ложные фиксированные решения, хотя на открытой местности приемник показывает себя с хорошей стороны. Поэтому, если вы работаете в хороших условиях для спутниковых наблюдений – этот прибор для вас подойдет.
Приемники на плате ComNav K708 692 канала являются более популярными, по сравнению с приемниками на плате NovAtel. Несомненным преимуществом таких приемников будет низкий ценник. На деле же есть ряд недостатков, которые для некоторых пользователей могут оказаться существенными, а именно: возможность получения ложного фиксированного решения в сложных условиях наблюдения, нестабильная работа в режиме РТК на большом удалении от БС (более 50 км). Эти недостатки в большинстве случаев обусловлены недоработками на математическом уровне обработки спутникового сигнала, поэтому своевременное обновление прошивки платы OEM приемника позволит со временем снизить влияние этих и прочих недочетов работы платы.
ГНСС-антенны приемников Существует различное множество видов ГНСС-антенн приемников с различными техническими характеристиками и формой. ГНСС-антенны могут быть совмещены в едином корпусе с приемником, а также использоваться в раздельной компоновке, где используются внешние ГНСС-антенна и сам приемник. Приемники, представляющие собой раздельное решение, обычно используются в качестве полевых или постоянно действующих базовых станций. Обычно, к таким приемникам можно подключить стандартную компактную антенну (типа Harxon HX-CSX601A), либо большую антенну типа Choke Ring (например, SOUTH CR3-G3 UHG). Антенны типа Choke Ring зачастую используются крупными сетями ПДБС, так как имеют высокую производительность подавления многолучевости и высоким коэффициентом усиления для низколетящих спутников. Стандартные компактные антенны типа Harxon HX-CSX601A являются универсальными антеннами, которые обладают более компактными размерами и массой с удобной формой, которая позволяет снизить ветровую нагрузку. Универсальность данного типа антенн заключается в том, что эти антенны могут быть использованы как при построении сетей ПБДС, так и одиночных полевых БС. Помимо этого, данные антенны, ввиду своей компактности, могут быть применены при морских и наземных изысканиях, мониторинге.
До начала 2000-х годов все приемники поставлялись в раздельной компоновке, однако позже на смену пришли приемники моноблочного типа, совмещающие в одном корпусе сам приемник и ГНСС-антенну. Приемники-моноблоки являются более универсальными по сравнению со своими предшественниками и позволяют выполнять работу в режимах база, ровер и статика гораздо более удобно. Антенны, используемые в данном типе приемников, также имеют различия, например, есть ГНСС-антенны спирального типа, их приемники выглядят продолговатыми в вертикальной плоскости (менее распространенный тип антенны), и классические антенны с горизонтальным экраном, такие приемники более приплюснутой формы. Наиболее распространенным типом будут являться антенны с горизонтальным экраном, который улучшает показатели подавления многолучевости и подавляет ложные сигналы по всему спектру частот. Если рассматривать конкретно линейку оборудования компании SOUTH – можно проследить следующую зависимость эффективности работы антенного элемента: чем больше площадь антенного элемента, тем эффективней приемник может получить полезный сигнал от спутника, подавив при этом ложные сигналы.
Преимущества и недостатки работы в РТК с помощью спутников дифференциальной коррекции В последнее время начали развиваться новые сервисы, позволяющие работать в режиме реального времени, основанные на методе PPP (Precise Point Positioning – позиционирование высокой точности). Данный метод позволяет передавать корректирующую информацию через геостационарные спутники, в отличие от работы в режиме РТК и передачи поправок от БС напрямую роверу. Такой подход позволяет увеличить расстояние между станциями в сети и реализует возможность передавать информацию от большого количества станций. Как и в случае с сетевым решением, в основе метода PPP лежит сеть постоянно действующих станций. Данные наблюдений с этих станций в реальном времени передаются в центр сбора и обработки. Данный центр обрабатывает полученную информацию, производит необходимые вычисления и передает корректирующую информацию на сервер, который транслирует полученную информацию в виде поправок через геостационарные спутники, либо через сеть интернет.
Преимуществами данного метода наблюдений будут являться:
- Высокая точность ГНСС-наблюдений, схожая с традиционным РТК (около 5 см);
- Нет необходимости в приобретении второго приемника для работы в качестве полевой базовой станции;
- Возможность работать там, где нет покрытия сотовой сети (при условии отслеживания спутника дифференциальной коррекции);
К недостаткам использования данного метода относятся:
- Ограниченность зоны покрытия спутниковых дифференциальных сервисов на территории РФ из-за расположения геостационарных спутников в плоскости экватора и отсутствия наличия станций на территории РФ;
- Прием спутниковой коррекции возможен только через специальный приемник, имеющий возможность приема спутникового сигнала в L-band диапазоне частот;
- Высокий ценник на подписку сервисов дифференциальной коррекции.
